ROS (Robot Operating System)
ROS is a middleware that provides libraries and tools to support the development of robot applications. It enables easy communication between robots.
Pub/Sub Communication
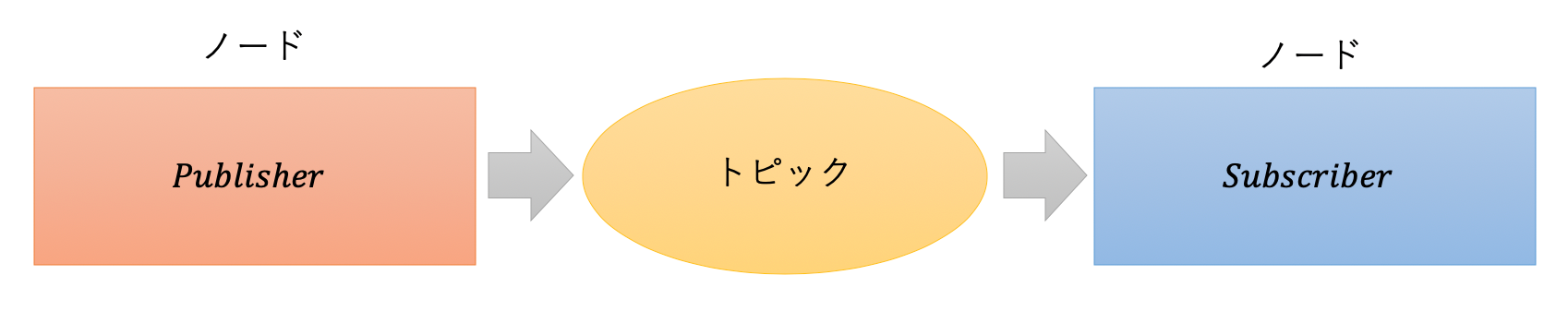
In ROS, an executable connected to the ROS network is called a “Node,” and messages are exchanged between nodes via named buses called “Topics.” The node that sends messages is called a Publisher, and the node that receives messages is called a Subscriber.
Environment
- ROS Kinetic
- Ubuntu 16.04 LTS
- Python 3.8.5
Publisher Program
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
# Publisher('Topic Name', Type, Queue Size)
pub = rospy.Publisher('chatter', String, queue_size=10)
# Initialize node
rospy.init_node('talker', anonymous=True)
# Loop rate
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
# Publish data
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
Subscriber Program
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
# Initialize node
rospy.init_node('listener', anonymous=True)
# Subscriber('Topic Name', Type, Callback function)
rospy.Subscriber("chatter", String, callback)
# Wait until callback is called
rospy.spin()
if __name__ == '__main__':
listener()
Combined Publisher and Subscriber Program
When implementing both Publisher and Subscriber functionality in a single node, the code looks like the following. In this example, the same node publishes messages to the chatter topic while simultaneously subscribing to it.
#!/usr/bin/env python
# coding: utf-8
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def controller():
# Initialize node
rospy.init_node('controller', anonymous=True)
# Subscriber
sub = rospy.Subscriber('chatter', String, callback)
# Publisher
pub = rospy.Publisher('chatter', String, queue_size=1)
# Loop rate
rate = rospy.Rate(10)
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
# Publish data
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
controller()
except rospy.ROSInterruptException:
pass