はじめに
回帰問題は、入力データとそれに対応する出力データの関係を学習し、未知の入力に対する出力を予測するタスクです。本記事では、最も基本的な回帰モデルである線形回帰を題材に、パラメータの推定方法として代表的な最小二乗法、最尤推定、MAP推定、そしてベイズ推定を比較し、その違いと特徴を解説します。
モデルとして、入力 \(x\) の非線形関数である基底関数 \(\phi(x)\) の線形結合を考えます。\(w\) をモデルのパラメータ(重み)、\(\epsilon\) を誤差とすると、モデルは以下のように表せます。
\[ y = \Phi w + \epsilon \]ここで、\(\Phi\) は計画行列と呼ばれ、各データ点の基底関数ベクトルを並べたものです。
1. 最小二乗法 (Least Squares Estimation)
最小二乗法は、モデルの予測値と実際の目標値との誤差の二乗和 \(S(w)\) を最小化するパラメータ \(\hat{w}\) を見つける手法です。
\[ S(w) = (y - \Phi w)^T (y - \Phi w) \]\(S(w)\) を \(w\) で微分してゼロとおくことで、以下の解が得られます。
\[ \hat{w}\_{LS} = (\Phi^T \Phi)^{-1} \Phi^T y \]これは解析的に解けるため、計算が非常に高速です。しかし、訓練データ数が少ない場合や、モデルの自由度が高い場合に**過学習(オーバーフィッティング)**を起こしやすいという欠点があります。
2. 最尤推定 (Maximum Likelihood Estimation)
最尤推定は、観測データが得られる確率(尤度)を最大化するパラメータ \(\hat{w}\) を見つける手法です。
ここで、誤差項 \(\epsilon\) が平均 \(0\)、分散 \(\sigma^2\) のガウス分布に従うと仮定します。すると、目標値 \(y\) の条件付き確率は、平均 \(\Phi w\)、分散 \(\sigma^2\) のガウス分布となります。
\[ p(y | w, \sigma^2) = \mathcal{N}(y | \Phi w, \sigma^2 I) = \frac{1}{(2\pi\sigma^2)^{N/2}} \exp\lbrace-\frac{1}{2\sigma^2}(y-\Phi w)^T(y-\Phi w)\rbrace \]この尤度の対数をとった対数尤度を最大化します。
\[ \ln p(y|w) = -\frac{N}{2}\ln(2\pi\sigma^2) - \frac{1}{2\sigma^2}(y-\Phi w)^T(y-\Phi w) \]対数尤度を最大化することは、右辺第二項の二乗誤差項を最小化することと等価です。したがって、誤差にガウス分布を仮定した場合、最尤推定は最小二乗法と等価な解を与えます。
\[ \hat{w}\_{ML} = (\Phi^T\Phi)^{-1}\Phi^{T}y \]3. MAP推定 (Maximum A Posteriori Estimation)
MAP推定は、過学習を抑制するための一般的な枠組みです。パラメータ \(w\) 自身も確率変数であると考え、その事前分布 \(p(w)\) を導入します。ベイズの定理を用いて、データが観測された後での \(w\) の事後分布 \(p(w|y)\) を考え、この事後確率が最大となる \(\hat{w}\) を求めます。
\[ p(w|y) = \frac{p(y|w)p(w)}{p(y)} \propto p(y|w)p(w) \]\(w\) の事前分布として、平均 \(0\)、共分散 \(\alpha^{-1}I\) のガウス分布を仮定します。これは「\(w\) の各要素は0に近い値をとるだろう」という事前知識をモデルに与えることに相当し、大きな値をとる重みにペナルティを課す正則化として機能します。
\[ p(w|\alpha) = \mathcal{N}(w|0, \alpha^{-1}I) \]このとき、事後分布を最大化する \(\hat{w}_{MAP}\) は、以下のようになります。
\[ \hat{w}\_{MAP} = (\Phi^T\Phi + \frac{\beta}{\alpha}I)^{-1}\Phi^{T}y \]ここで、\(\beta = 1/\sigma^2\) です。この解は、リッジ回帰(L2正則化付き最小二乗法) と呼ばれる手法と同じ形をしており、正則化項 \(\frac{\beta}{\alpha}I\) のおかげで、\(\Phi^T\Phi\) が正則でない(逆行列を持たない)場合でも安定して解を求めることができ、過学習を抑制します。
4. ベイズ推定 (Bayesian Estimation)
最小二乗法、最尤推定、MAP推定は、いずれも最適なパラメータ \(w\) を一つの値(点推定)として求めました。しかし、このアプローチでは「パラメータがどのくらい確からしいか」という不確実性を表現できません。
ベイズ推定では、\(w\) を点として求めるのではなく、事後分布 \(p(w|y)\) そのものを求めます。この分布は、データを見た後での、あり得る全ての \(w\) の値に対する確率分布を表します。
MAP推定で用いた事前分布と尤度(どちらもガウス分布)を用いると、事後分布もまたガウス分布になることが知られています(共役性)。
\[ p(w|y) = \mathcal{N}(w | \mu_N, \Sigma_N) \]ここで、事後分布の平均 \(\mu_N\) と共分散 \(\Sigma_N\) は以下で与えられます。
\[ \mu_N = (\Phi^T\Phi + \frac{\beta}{\alpha}I)^{-1}\Phi^{T}y \]\[ \Sigma_N = (\beta\Phi^T\Phi + \alpha I)^{-1} \]新しい入力 \(x_*\) に対する予測を行うには、あり得る全ての \(w\) で予測を行い、それを事後確率で重み付けして平均します。これを予測分布と呼びます。
\[ p(y*\* | x*\_, y) = \int p(y\_\_ | x\_\*, w) p(w|y) dw \]この予測分布は、予測の平均値だけでなく、その予測がどの程度不確かであるかを示す**分散(信頼区間)**も与えてくれます。
実験結果
- データ: \(y = \sin(2\pi x)\) からノイズを加えて生成した15点の訓練データ
- 基底関数: 9次の多項式 (\(f_j(x) = x^j, j=0, ..., 9\))
- ハイパーパラメータ: \(\alpha=1.0, \beta=10.0\)
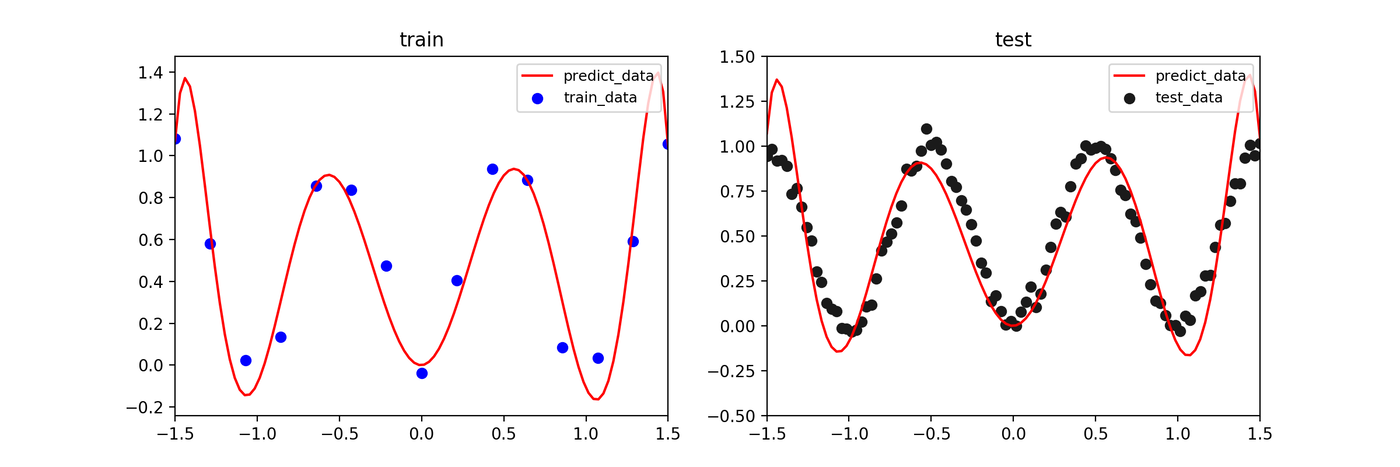
最小二乗推定 / 最尤推定
訓練データに強く適合しようとするため、データのない領域で予測が大きく振動し、過学習を起こしています。
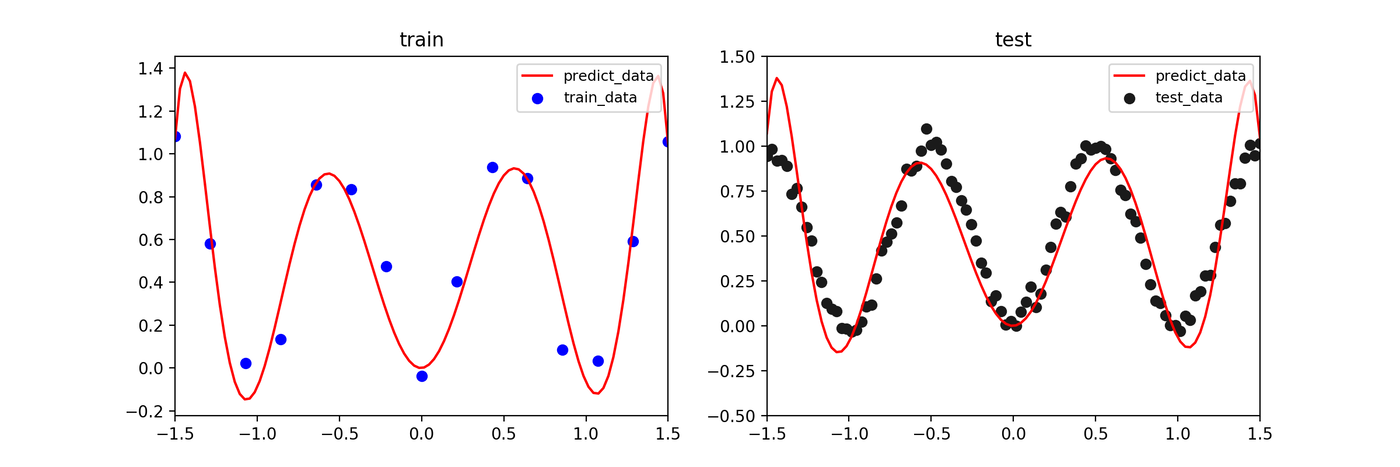
MAP推定
事前分布(正則化)の効果により、過学習が抑制され、より滑らかな予測曲線が得られています。
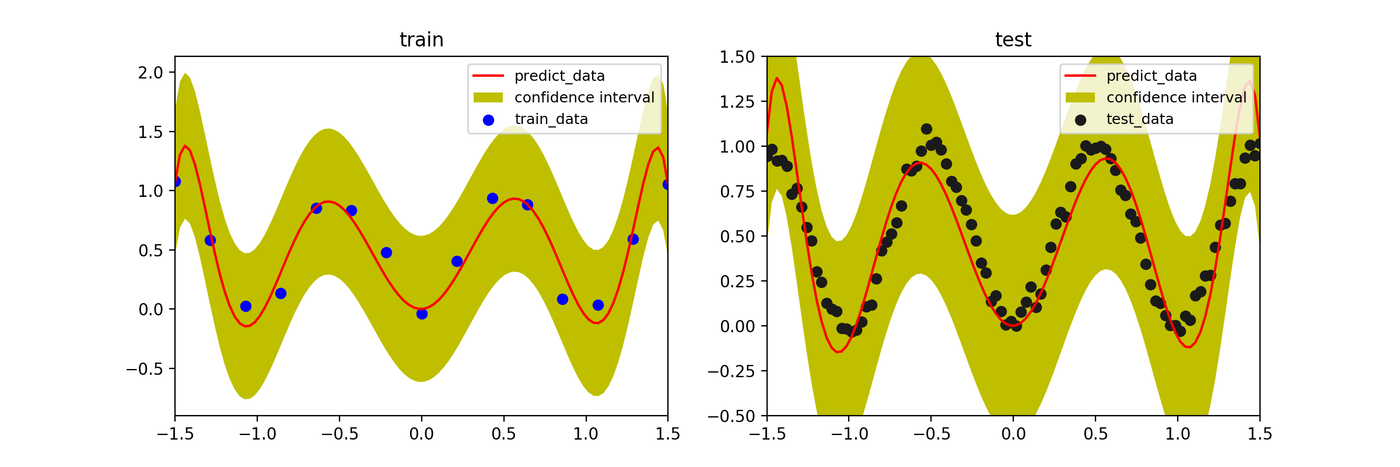
ベイズ推定
MAP推定と同様に滑らかな予測(平均値、実線)が得られると同時に、訓練データが少ない領域では予測の不確実性が増大し、信頼区間(青い影の領域)が広がっていることがわかります。
モデルの評価(決定係数 \(R^2\))
決定係数は、モデルの当てはまりの良さを示す指標(1に近いほど良い)です。MAP推定とベイズ推定(の平均)が、最小二乗法よりも高いスコアを示しています。

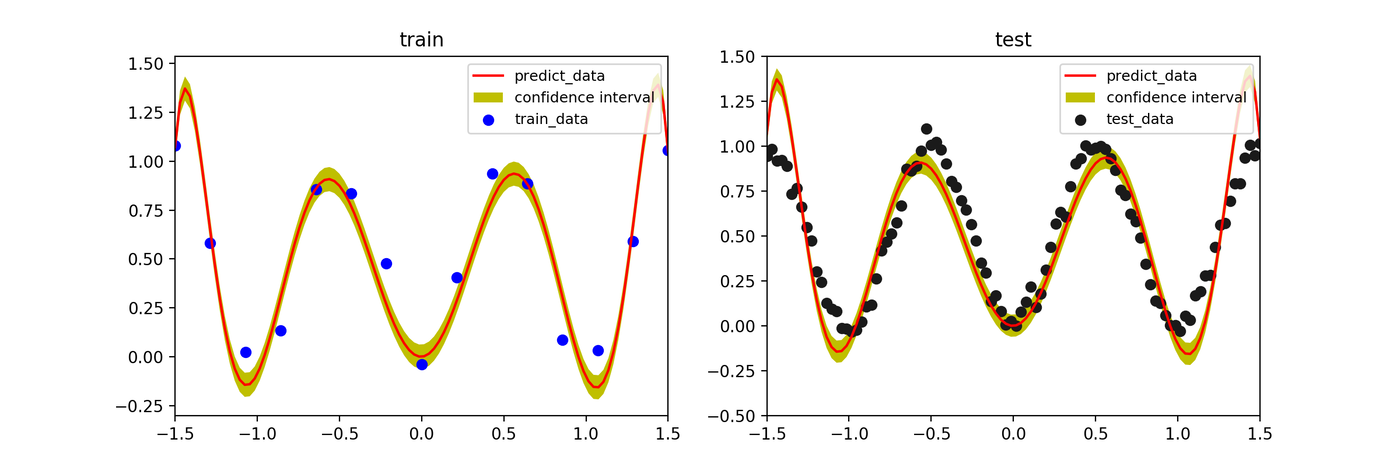
ハイパーパラメータ \(\beta\) の影響
ベイズ推定において、尤度の精度パラメータ \(\beta\)(ノイズの逆分散)を大きくすると、モデルは訓練データにより強く適合しようとします。値を大きくしすぎると、信頼区間が狭まり、過学習に近づいていく様子がわかります。
- \(\beta=50\)
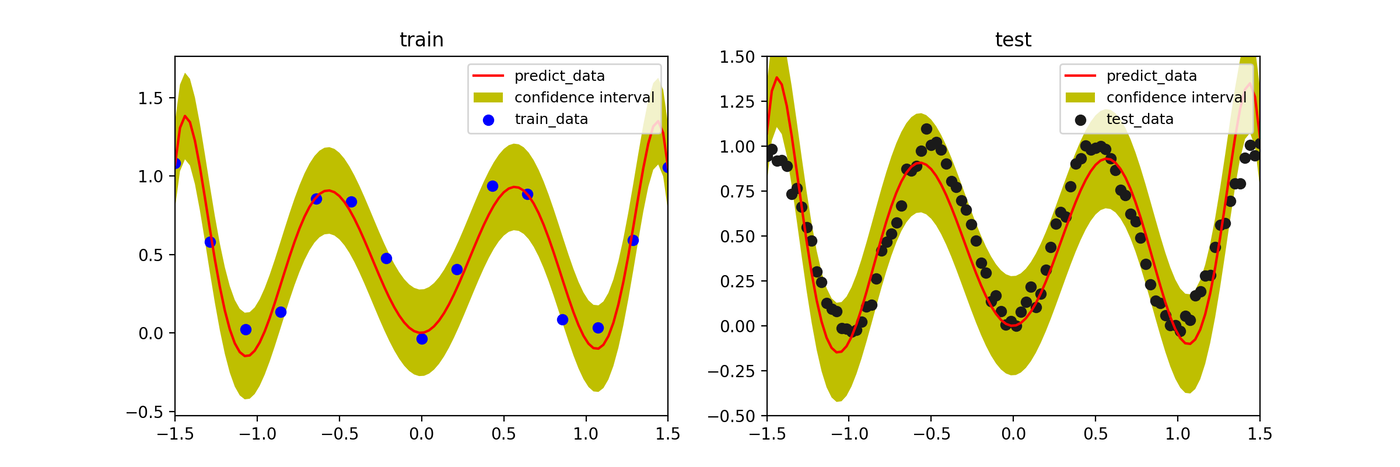
- \(\beta=100\)
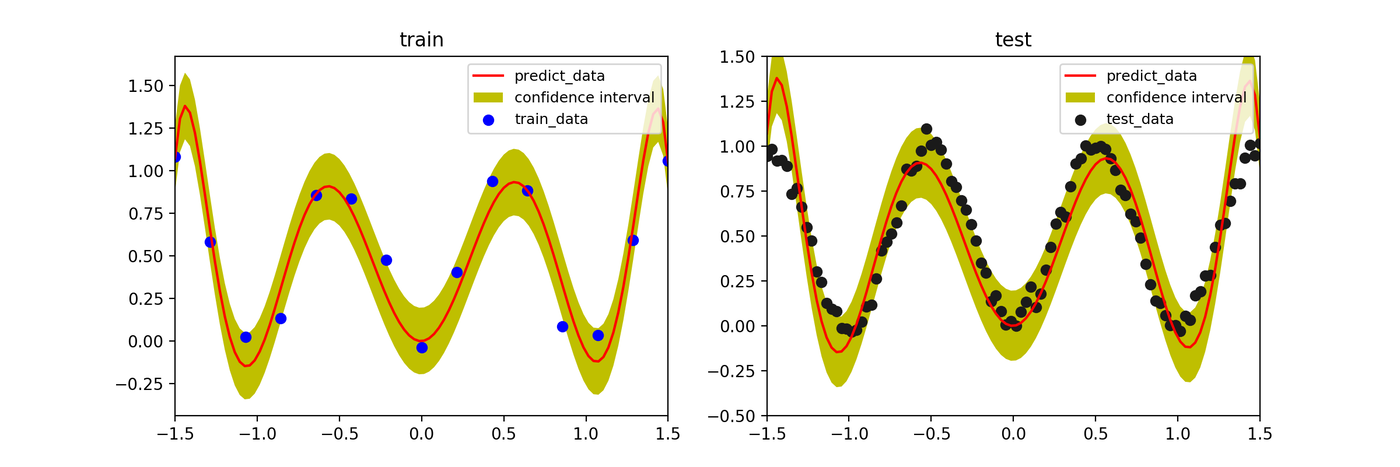
- \(\beta=1000\)
まとめ
- 最小二乗法・最尤推定: シンプルで高速だが、過学習しやすい。
- MAP推定: 事前分布(正則化)を導入することで、過学習を抑制できる。
- ベイズ推定: パラメータの不確実性を考慮し、予測の信頼区間を得ることができる。データが少ない領域で不確実性が増大するなど、よりリッチな情報を提供してくれる。
参考文献
- C.M. ビショップ, パターン認識と機械学習 上, 丸善出版 (2012)
- 須山 敦志, ベイズ推論による機械学習入門, 講談社 (2017)